
Technology
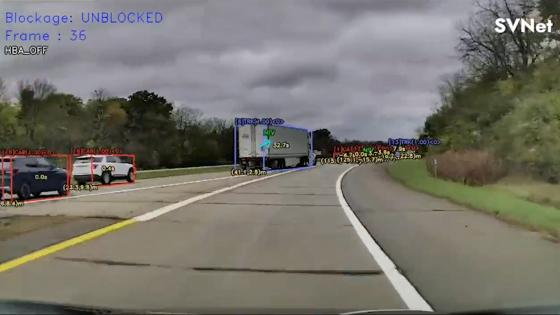
SVNet
Cutting Edge AI Technology
SVNet由基于分析摄像头传输的数据进行深度学习的感知软件构建而成,在感知及分类多种物体方面具备卓越性能,属于核心自研技术。 已获得167项深度神经网络相关US专利,并经过ASPICE认证。受到业内认可,在多种商用项目中得到运行及检验。
The Most Advanced Deep Learning Algorithm
SVNet的高准确度不仅是因为学习训练,而是通过 meta-learning-based data sampling, feature-enhancing learning, hard example mining, knowledge distillation等多种最先进技术运用于学习算法中实现的。由此,更准确地找出更多目标物体,并在细分过程中提供更高的性能。



High Efficiency
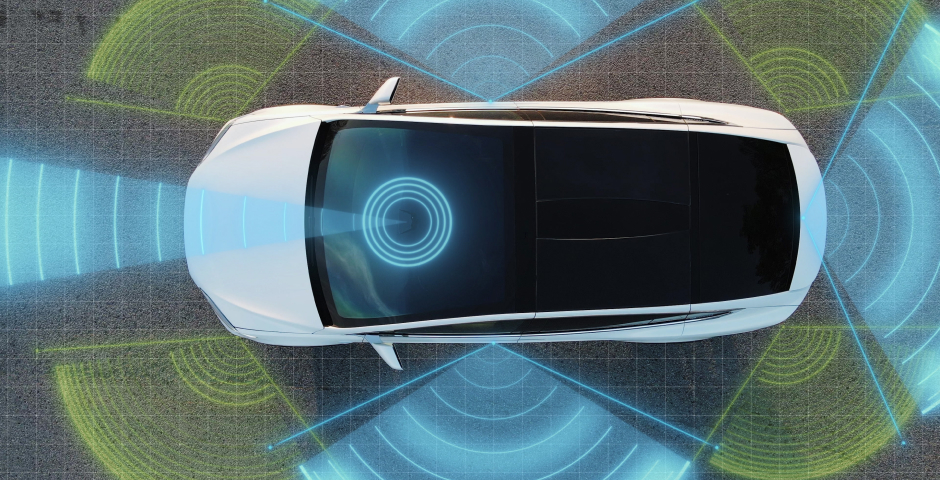
SVNet是使用基于小型DNN算法的轻量化解决方案,可充分减少每一帧的运算量。因此,可最大程度地降低运算所需的硬件资源-内存以及电量等,进而大幅提升效率。在 2TOPS 以下的低价芯片组中,也能保持30fps以上高性能。
- SoC
- Low tier SoC (As low as 2TOPS)
- Function
- Vehicle Detection, Pedestrian Detection, Static Object Detection, Lane Detection, Road Boundary Detection, Traffic Sign Recognition, Light Source Detection, Scene Classification
-
Frame
per second - 30fps
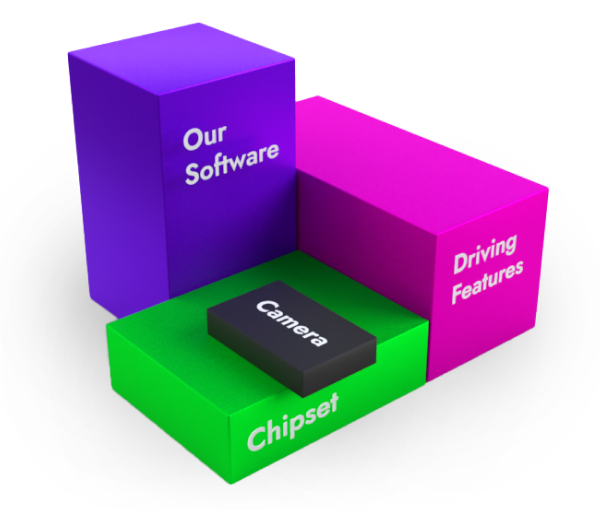
Fully Optimized Modular Solution
SVNet可完美用于客户所需的ADAS及自动驾驶的任何硬件。由此,缩短客户产品上市的时间。
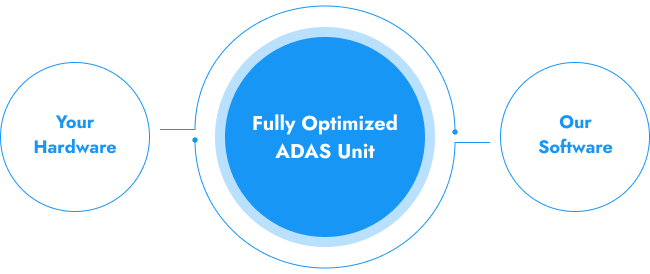

Flexible Solution to Support Any SoC
SVNet以其轻量化的优点运用于30个以上的平台,可在硬件方面实现卓越性能。除商用平台外,也适用于研发阶段的平台。
此外,SVNet还是TI公司的TDA2x以及 Renesas 公司的V3H、V3M和H3上所配置的首个深度学习算法。
待续








Product
Product Overview
-
FrontVision

FrontVision 利用前置摄像头的输入来检测道路上的各种元素,例如车辆、行人、车道、交通灯和交通标志。 它使用户能够开发不同自主级别的自动驾驶功能,从Euro GSR/NCAP法规要求的基本ADAS功能到L2/L2+/L3级别以上的自动驾驶功能。
-
SurroundVision
SurroundVision将环视摄像头图像作为输入,检测车辆周围的各种物体,包括车辆、行人、停车位和路缘石。 凭借其高精度的感知输出,使用户能够开发安全功能,例如盲点监控系统以及自动停车辅助功能,即使在具有挑战性的场景中也能完美工作
-
MultiVision

MultiVision利用前、后、侧和环视(鱼眼)摄像头的组合,在公共道路和停车场环境中提供车辆周围的全面物体信息。 它可以在不同的操作设计域(ODD)中实现L3或以上的ADAS和自动驾驶功能。
