
Technology
SVNet
Cutting Edge AI Technology
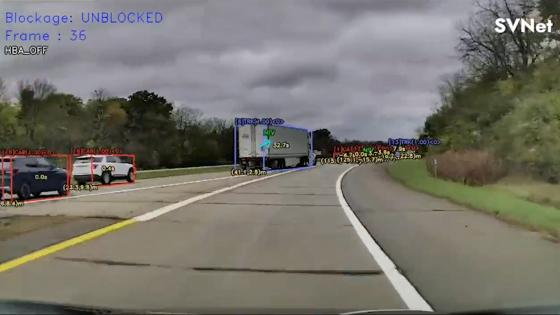
SVNet은 카메라로부터 전달되는 데이터를 활용한 딥 러닝 기반의 인식 소프트웨어를 구성하는 핵심 자체 기술로 다양한 사물을 인지하고 분류하는 데에 탁월한 성능을 보유하고 있습니다. 이미 167개의 딥 뉴럴 네트워크 관련 미국 특허를 보유하고 있고 ASPICE 인증을 획득하는 등 업계에서 인정 받는 네트워크로 다양한 상용 프로젝트에 이미 적용되어 그 성능을 입증하고 있습니다.
The Most Advanced Deep Learning Algorithm
SVNet의 높은 정확도는 단순 학습이 아니라 meta-learning-based data sampling, feature-enhancing learning,
hard example mining, 및 knowledge distillation 과 같은 다양한 최첨단 기술을 학습 알고리즘에 적용함으로써
가능해집니다.
이를 통해, 보다 정확하고 가능한 많은 대상 후보를 찾아내고 이를 세분하는 과정을 통해서 더 높은 성능을 제공할
수 있습니다.



High Efficiency
SVNet은 소형 DNN 기반 알고리즘을 사용하는 경량 솔루션으로, 프레임당 필요한 연산량을 최소화하는 것이
가능합니다. 따라서 연산에 필요한 하드웨어 리소스인 메모리나 전력소모 등도 최소한으로 유지할 수 있어 효율성을
극대화 할 수 있습니다.
따라서 2TOPS 미만의 저가의 칩셋에서도 30fps 이상의 속도로 높은 수준의 성능을
유지할 수 있습니다.
- SoC
- Low tier SoC (As low as 2TOPS)
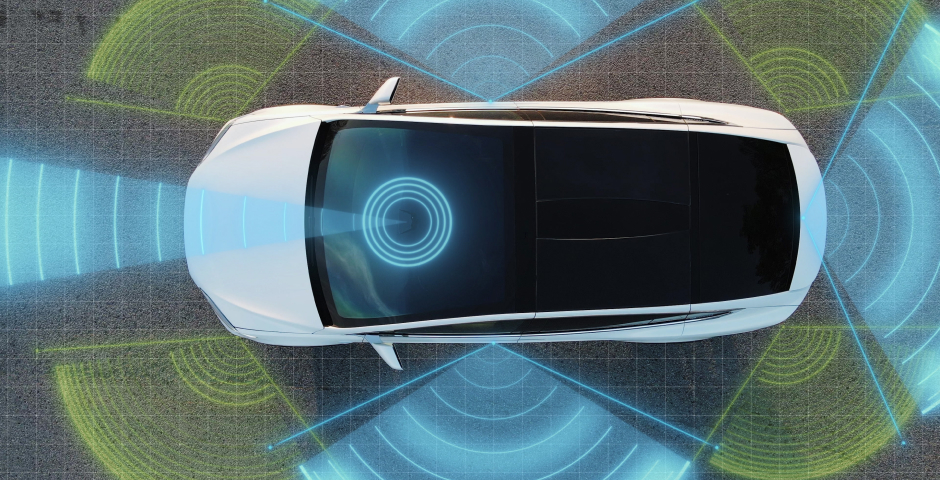
- Function
- Vehicle Detection, Pedestrian Detection, Static Object Detection, Lane Detection, Road Boundary Detection, Traffic Sign Recognition, Light Source Detection, Scene Classification
-
Frame
per second - 30fps
Fully Optimized Modular Solution
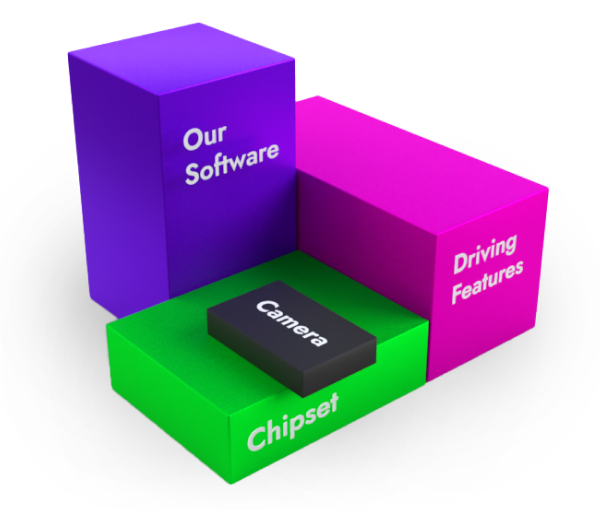
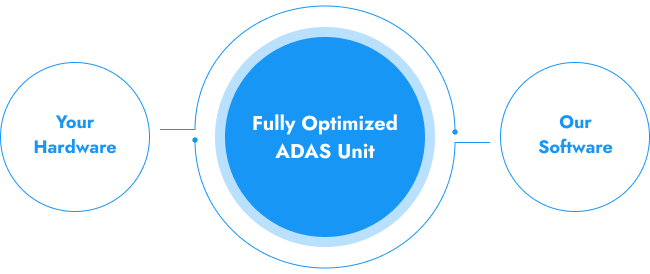
SVNet은 고객이 원하는 ADAS와 자율주행에 필요한 어떤 하드웨어에서도 완벽하게 최적화되어 적용가능합니다. 그리고 이를 통해 고객은 시장 출시 시간을 단축할 수 있습니다.

Flexible Solution to Support Any SoC
SVNet은 경량화가 가능한 장점을 활용하여 이미 30개 이상의 플렛폼에 적용하여 하드웨어에 최적화된 성능을 보이고
있으며, 상용화가 된 플랫폼 뿐만 아니라 개발 단계가 진행중인 플랫폼에서도 완벽하게 구동됩니다.
또한 SVNet은 TI사의 TDA2x와 Renesas 사의 V3H, V3M, H3에 포팅된 최초의 딥러닝 기반 알고리즘 입니다.
Available on








Product
Product Overview
-
FrontVision

FrontVision은 전방카메라의 영상을 기반으로 차량, 보행자, 차선, 신호등, 교통 표지판 등 도로 위 다양한 객체들을 인지하여 이러한 정보를 바탕으로 Euro GSR/NCAP을 만족하는 기본적인 ADAS 기능부터 L2/L2+/L3 레벨 이상의 자율 주행 보조 기능까지 지원 할 수 있도록 높은 정확도와 안정성을 제공합니다.
-
SurroundVision
SurroundVision은 서라운드뷰 카메라에 기반하여 차량, 보행자, 주차 슬롯, 연석 등 주차 환경에 존재하는 다양한 객체들을 인지하여, 이러한 정보를 바탕으로 복잡한 환경에서도 사각지대 감지를 통한 안전 기능부터 자동주차 기능를 안전하게 수행할 수 있도록 높은 정확도와 안정성을 제공합니다.
-
MultiVision

MultiVision은 단일 카메라뿐 아니라 전후방, 서라운드뷰, 전후측방 카메라들의 다양한 조합의 다중 카메라 시스템에 기반하여 차량 주변의 360도 시야를 확보하고 주행 경로 상에 있는 차량, 보행자, 자전거 운전자, 주행가능 공간, 교통 표지판, 신호등을 감지합니다. 이러한 정보들을 어떤 상황에서도 높은 정확도와 안전성을 확보하여 제공하여 자율주행과 자율주차 모두를 하나의 솔루션으로 지원할 뿐 아니라, 더욱 높은 자동화 단계(L3이상) 또한 달성 가능하게 합니다.
