
Technology
SVNet
Cutting Edge AI Technology
SVNetは、カメラのセンサーから得られるデータに基づくディープラーニングを搭載した検知ソフトウェアを構成する核となる独自技術によって、 多様な事物を検知し分類できる優れた性能を備えています。ディープニューラルネットワークに関連するUS特許の取得数は167をえており、 Automotive SPICE(ASPICE)の認証を獲得するなど、業界で認められているネットワークとしてすでに様々な商用のプロジェクトに適用されており、その性能を証明しています。
The Most Advanced Deep Learning Algorithm
'SVNetの高度な正確性は、非連合学習ではなくメタ学習に基づくデータのサンプリング、機能拡張学習、HEM(ハード・イグザンプル・マイニング)、 知識蒸留など多様な最先端の技術を学習アルゴリズムに適用させることによって実現されています。これによって、より正確に、できる限り多くの対象・候補を見出し、 これを細分化するプロセスを経てさらに優れた性能を提供できるようになっています。



High Efficiency
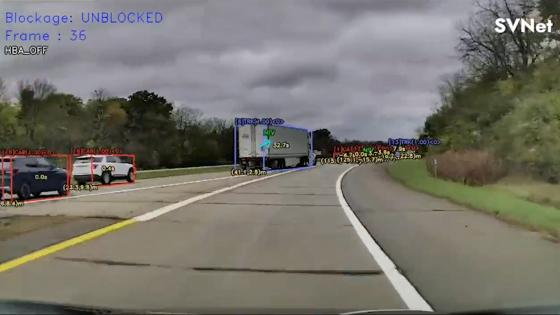
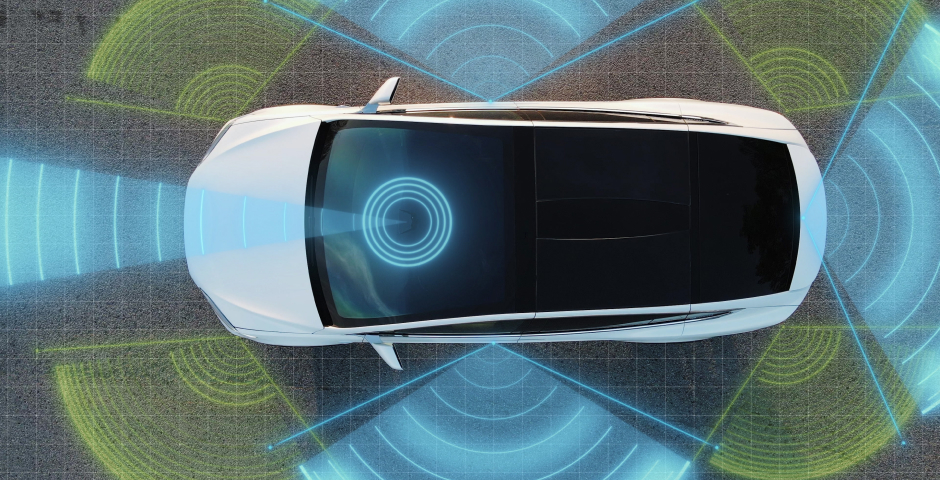
SVNetは、小型ディープニューラルネットワーク(DNN)で軽量化されたソリューションであり、フレームあたりに必要の演算量を最小限に抑えることが可能です。
そのため、演算に必要となるハードウェアのリソースであるメモリや消費電力などを最小限の水準に維持でき、極限まで効率化することが可能です。
2TOPS未満の安価なチップセットでも30fps以上のスピードで高水準の性能を維持できます。
- SoC
- Low tier SoC (As low as 2TOPS)
- Function
- Vehicle Detection, Pedestrian Detection, Static Object Detection, Lane Detection, Road Boundary Detection, Traffic Sign Recognition, Light Source Detection, Scene Classification
-
Frame
per second - 30fps
Fully Optimized Modular Solution
SVNetは、先進運転支援システム(ADAS)および自動運転のために使われる、お客様の希望するあらゆるハードウェアにて最適化が可能です。 これによってお客様は市場へのリリースにかかる時間を短縮できます。

Flexible Solution to Support Any SoC
SVNetは軽量化できるという強みを生かし、すでに30以上のプラットフォームに適用するとともにハードウェアに対して最適化された性能を発揮しています。
実用化されたプラットフォームだけでなく、開発進行中のプラットフォームにおいても柔軟な対応で実装可能です。
また、SVNetは、テキサス・インスツルメンツ(TI)社のTDA2xおよびルネサス社のV3H、V3M、H3に移植された最初のディープラーニングに基づくアルゴリズムです。
直ちに対応可能なハードウェア








Product
Product Overview
-
FrontVision

FrontVisionは、前方カメラの映像を基に車両、歩行者、車線、信号機、交通標識など道路上の様々なものを認識します。 この情報によりEuro GSR/NCAPを満たす基本的なADAS機能からL2/L2+/L3レベル以上の自動運転補助機能まで支援できる、高い精度と安定性を提供します。
-
SurroundVision
SurroundVisionは、サラウンドビューカメラに基づいて車両、歩行者、駐車スペース、縁石など、駐車環境に存在する様々な物体を検知します。 この情報を用いて複雑な環境でも死角監視システムのような安全機能からオートパーキング支援の遂行ができるように、高い精度と安定性を提供します。
-
MultiVision

MultiVisionは、前後方、側面、サラウンドカメラの組合せとして獲得した映像から一般道路と駐車環境に存在する多くの物体を検知します。 どのような状況でも高い精度と安定性を確保し、情報を提供します。 自動運転とオートパーキングを一つのソリューションとして支援し、より高い自動運転レベル(L3以上)も達成可能です。
